2. Four wheeled welding mobile robot

This mobile robot works only with linear profile and directed by two bars assembled at both ending sides of the robot.
There are three welding modes used according to different applications: spot welding, segment welding and continuous welding.
The feedback signals from an encoder concentrically attached to motor axis are used to estimate and steadily maintained the welding velocity of the robot by using PID control law.
The PIC18F458 is utilized as the microprocessing unit of the robot control system. The robot has been using at Saigon's shipyard in Vietnam.
3. Automatic Data Processing for 3-Axis Compression Test

This equipment is used to monitor the drainage from soil specimen during compression test.
the water flowing away from the specimen goes through a vertical pipe.
To recognize easily the movement of water level, the red color oil is poured into the pipe.
The CMU camera is controlled along the vertical pipe to track the boundary between water and color oil.
An encoder is used to get the camera position and monitored by a microcontroller PIC18F458.
The drainage can be estimated basing on the pipe inside diameter and signal from the encoder.
4. Analyzing stable operating conditions of journal bearing
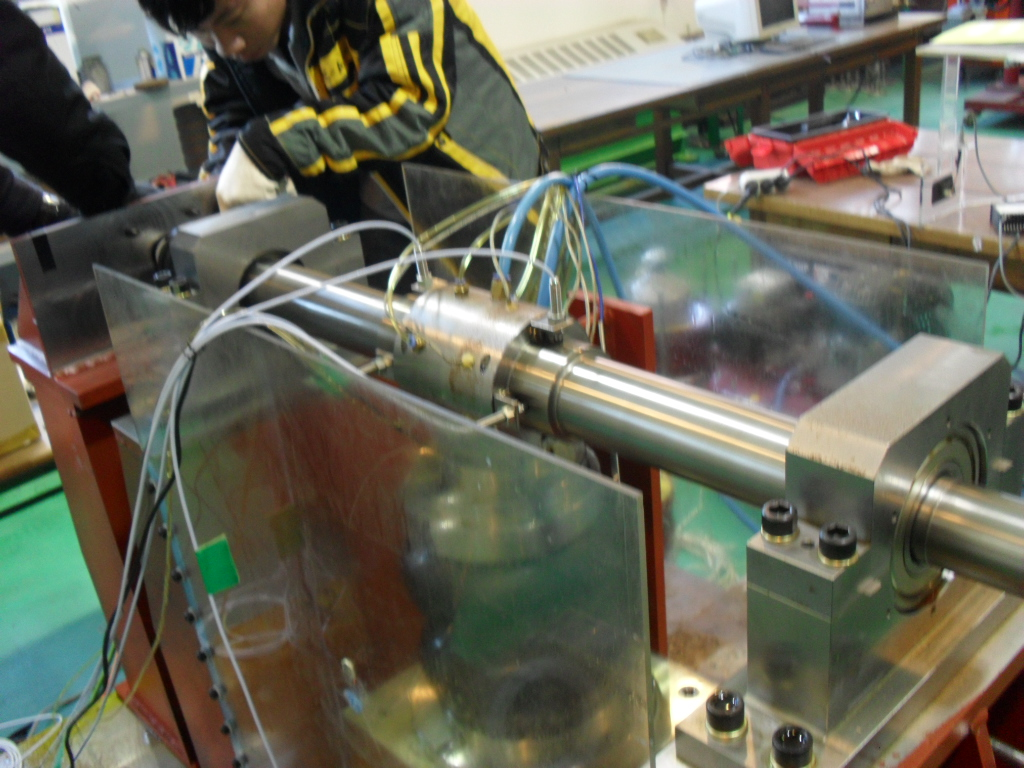
This test-rig is utilized to analyze the stability of steadily loaded journal bearing in different clearances and rotation speeds.
the bearing used in this model is 85 mm in diameter and 136 mm in length. The vertical load on the bearing is supplied by compressed air balloon.
The holes are made on the bearing to insert the thermal sensors and supply the lubricant.
The shaft is concentrically connected with a compressed air motor and can be adjusted from 0 to 3000 rpm.
All signals are recorded by the LDS data acquisition system.
The experimental results are compared with theoretical results analyzed on computer. (add rotor dynamics)
5. Hydraulic Power Plant Model
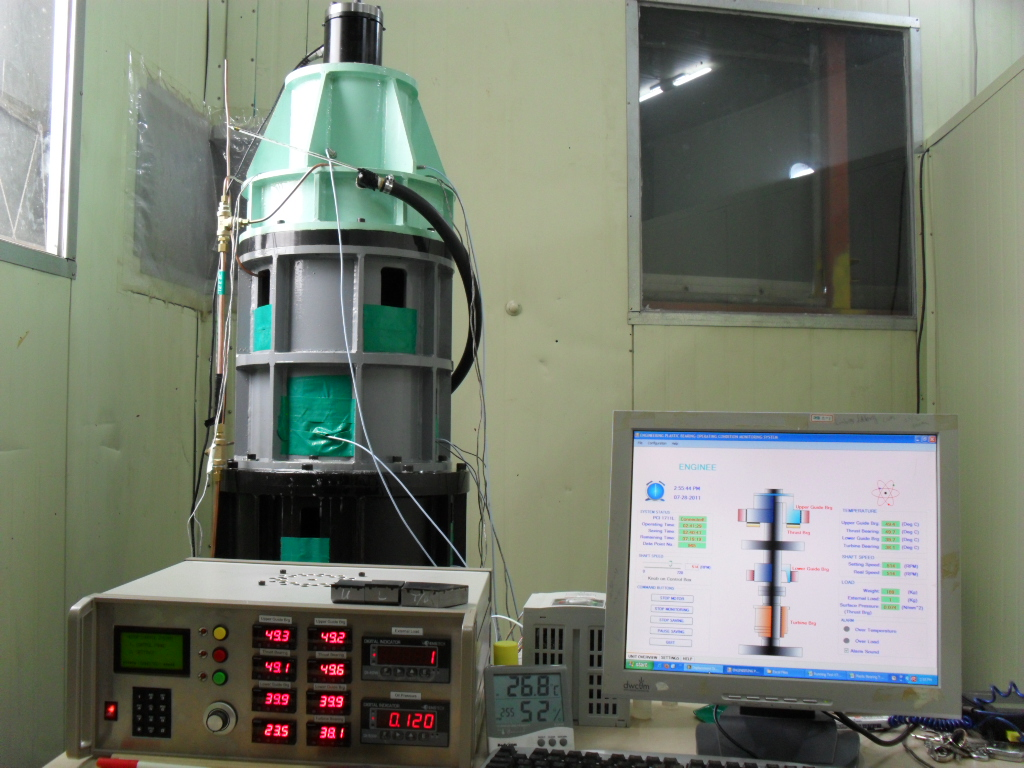
This is a one-fourth scaled model of a real hydraulic power plant operating in South Korea.
In this model, the signals needed to monitor are bearings (4 types of bearing: thrust, upper guide, lower guide and turbine)
temperature, machinery vibration, oil pressure, vertical load (supplied by hydraulic system and measured by using loadcell).
Three computing programs are employed: (1) VB.Net used for communicating with PCI 1711L card and Frequency Inverter to control the shaft speed,
displaying some values of temperature, oil pressure, vertical load, (2) Labview used for monitoring the vibration signals and analyzing the stable conditions of the system,
(3) Matlab used for analyzing the rotor dynamics to find the critical frequencies. A control box including a microcontroller PIC18F452,
LCD display, keypad, thermal, pressure and load indicators, is also made to easily do experiments without computer.
6. Bending Machine

This system is employed to bend PEEK plates at high temperature. a microcontroller PIC18F452 is used to communicate with frequency inverter to drive 3-phase AC motor.
The motor is automatically changed in direction according to the length of PEEK plate and stopped when the desired arc is reached.
The bending force can be variable by adjusting the overflow valve in hydraulic system.
7. Wear Testing System
The system is built to determine and compare the mechanical wearing coefficients of PEEK and White metal. T
he motor controlling process is almost similar to Friction Testing System.
A potentiometric linear transducer with high precision (0.001mm) is used to detect the amount of wear.
Because of high precision requirement, an indicator integrated with amplifier and RS485 communication standard is employed to monitor the transducer outputs.
Monitoring program, coded in VB.Net, is utilized to record the data from indicator through RS485 communication procedure and exported them to Excel files.
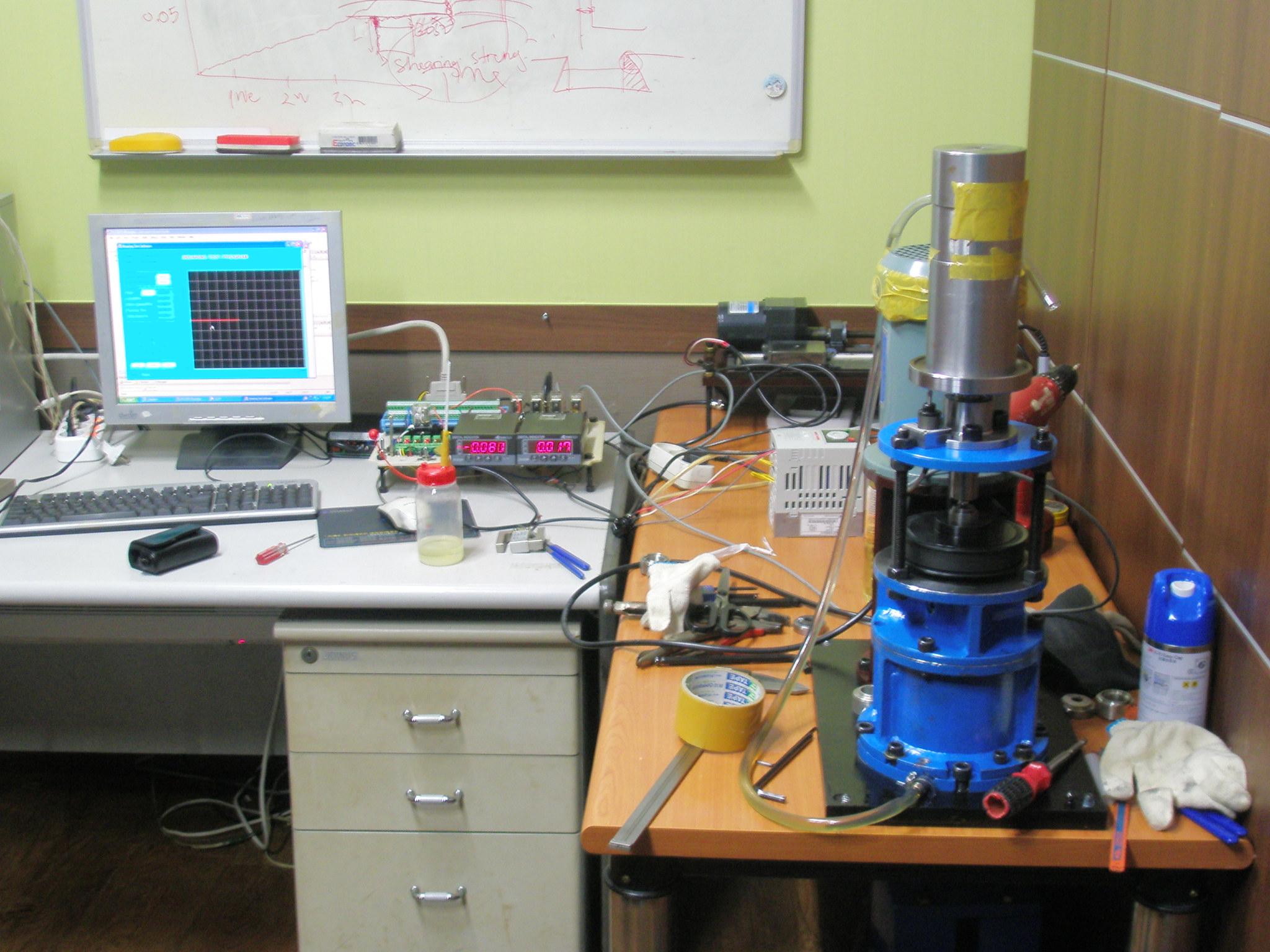
8. Friction Testing System

This sytem is used to determine and comparethe friction coefficient of supper engineering plastic (PEEK) and white metal.
The computer communicates with Frequency inverter through RS485 standard by using Visual Basic.Net Program to controls the AC motor velocity and direction.
The motor then pulls the mass through a force sensor (loadcell). The loadcell outputs are connected with amplifier circuits and A/D channels of PCI 1711L Card
and monitored by the computer also through the VB.Net program. The friction between mass surface (PEEK) and floor (Steel) are determined basing on the monitored force and mass weight.
The results are continuously displayed in the chart form and exported to Excel files.
9. Super Engineering Plastic Bearing for Hydraulic Power Plant
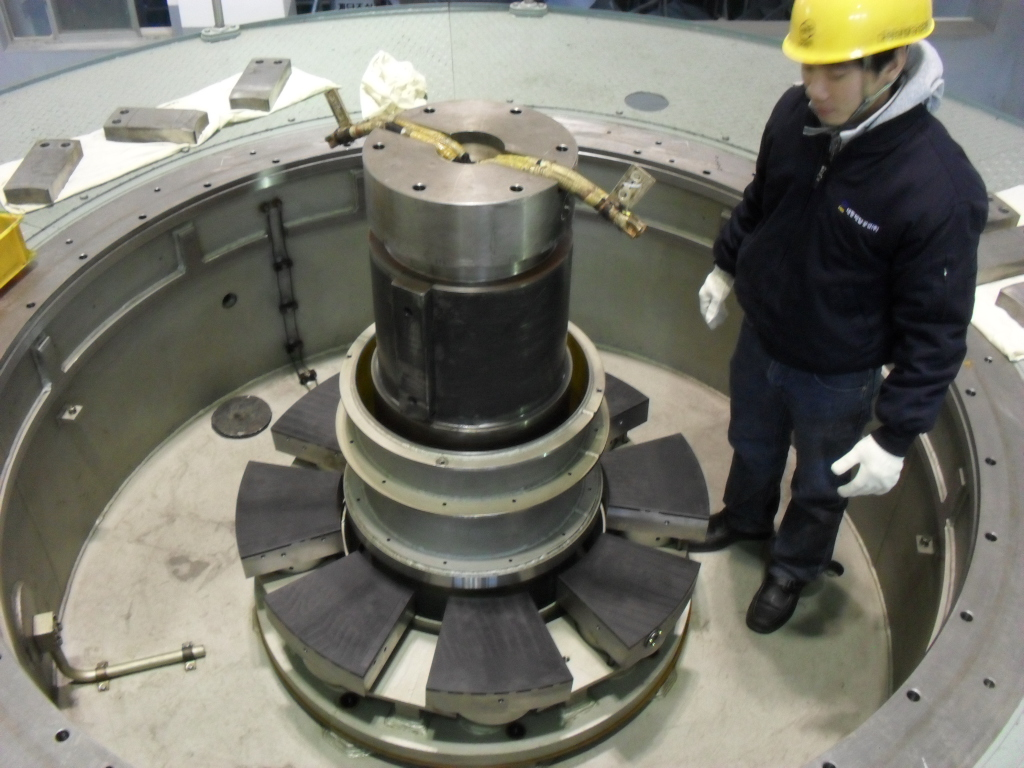
This project is about making the super engineering plastic (PEEK) bearings to replace the traditional white metal bearings in Sum-Jin-Gang Hydraulic Power Plant in South Korea.
The bearings include Thrust bearing, Upper guide bearing, Lower guide bearing and Turbine bearing. This is one of the innovating projects in Korea Hydro & Nuclear Power (KHNP). The products are now using
in SumJinKang Hydro Power Plant.
10. Thrust and Journal bearings monitoring system

This system is designed to monitor the operating conditions of thrust and journal bearings at high speed and high load. The monitored parameters are bearings and oil temperature,
oil pressure, load, vibration. The proximity sensors are also used in this system to determine the position of shaft inside the bearing. The maximum velocity of shaft is 3600 rpm and drived by 22 kw AC motor.
The monitoring and analyzing program is made with Visual Basic.Net software.